
Ηλεκτρονικη αγκυρα βαρκας με gps !!
Σελίδα 1 από 5 • 1, 2, 3, 4, 5 
Απ: Ηλεκτρονικη αγκυρα βαρκας με gps !!
από -nikos- Τρι Δεκ 12, 2017 7:57 pm
το γκατζετακι μπορει να κανει και 1,5 μηνα για να ερθει απο την κινα...
στο εντομεταξυ θα κανω οσο περισσοτερη ερευνα γυρο απο το θεμα,
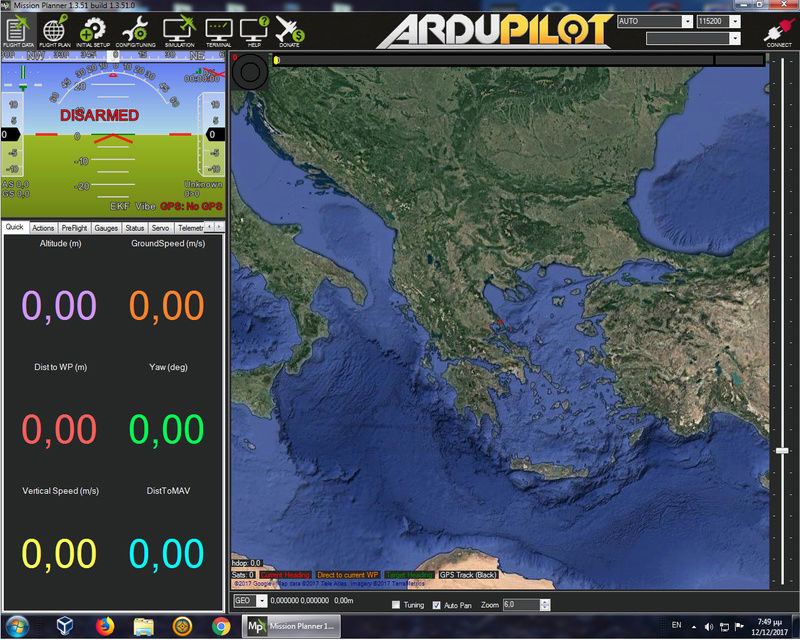
το προγραμμα
κατεβενει εδω= http://ardupilot.org/planner/docs/common-install-mission-planner.html
_________________
«αν κλείσεις την πόρτα σου σε κάθε πλάνη, στο τέλος θα μείνει απ' έξω και η αλήθεια»

-nikos-- Admin
- Αριθμός μηνυμάτων : 2890
Ημερομηνία εγγραφής : 29/05/2013 -

Απ: Ηλεκτρονικη αγκυρα βαρκας με gps !!
από -nikos- Παρ Ιαν 05, 2018 12:21 pm

και εχει και ολα τα παρελκομενα του οπως τα περιεγραφε στο λινκ..
και εκπεμπει στα 915ΜΗΖ...
πρεπει τωρα να ''στήσω'' ενα εικονικο drone με τις μπαταριες του
και με τα σερβο [αντι για μοτερ] ωστε να αρχισω τα πειραματα...
πιθανον να χρειαστει τελικα να στησω ενα κανονικο ελικοπτερακι...

δεν ξερω ακομη...
_________________
«αν κλείσεις την πόρτα σου σε κάθε πλάνη, στο τέλος θα μείνει απ' έξω και η αλήθεια»
-nikos-- Admin
- Αριθμός μηνυμάτων : 2890
Ημερομηνία εγγραφής : 29/05/2013 -
Απ: Ηλεκτρονικη αγκυρα βαρκας με gps !!
από -nikos- Παρ Ιαν 05, 2018 10:27 pm
ο κωδικας=

για να καταλαβετε τι κανει αυτος ο κωδικας
δειτε αυτο το βιντεο=
https://www.youtube.com/watch?v=9G8JasPzUk8&t=9s
_________________
«αν κλείσεις την πόρτα σου σε κάθε πλάνη, στο τέλος θα μείνει απ' έξω και η αλήθεια»
-nikos-- Admin
- Αριθμός μηνυμάτων : 2890
Ημερομηνία εγγραφής : 29/05/2013 -
Απ: Ηλεκτρονικη αγκυρα βαρκας με gps !!
από -nikos- Δευ Ιαν 08, 2018 1:53 pm
φτιαξω ενα μικρο τηλεκατευθηνομενο σαν αυτο=
https://www.youtube.com/watch?v=jsUzSFxwb4g
ηδη σημερα μετετρεψα δυο σερβο σε συνεχους κινησης ακολουθωντας
τις οδηγειες αυτου του βιντεο=
https://www.youtube.com/watch?v=6G1nHfvl4aI
να προσθεσω οτι δεν χρειαζεται να αντικαταστησει καποιος το ποντεσιομετρο με διερετη τασης,, απλα κοβουμε λιγο το σημειο οπου ερχεται σε επαφη το γραναζι με το ποντεσιομετρο...
ετσι μπορουμε να κανουμε και μικρορυθμισεις πριν το κλεισουμε.
ο στοχος ειναι αυτος=
αν καταφερω να φτιαξω αυτο θα καταφερω να φτιαξω
και την ηλεκτρονικη αγκυρα....
να προσθεσω
οτι με την πλακετα ενος σερβο μπορουμε να μετατρεψουμε
πολυ ευκολα το 50hz σημα οδηγησης σερβο και esc σε απλο pwm για οδηγηση απλου μοτερ με καρβουνακια...το τσεκαρα στον παλμογραφο !!!
ο λογος για να μπορουμε να οδηγησουμε και μεγαλα σερβο μοτερ πχ μοτερ υαλοκαθαριστηρα με τηλεχειρισμο.
_________________
«αν κλείσεις την πόρτα σου σε κάθε πλάνη, στο τέλος θα μείνει απ' έξω και η αλήθεια»
-nikos-- Admin
- Αριθμός μηνυμάτων : 2890
Ημερομηνία εγγραφής : 29/05/2013 -
Απ: Ηλεκτρονικη αγκυρα βαρκας με gps !!
από -nikos- Τρι Ιαν 09, 2018 3:27 pm
βρηκα μια παλια τηλεκατευθηνση

και εστησα το drone ,,,

μια χαρα δουλευει σαν τηλεκατευθηνομενο..
το επομενο βημα ειναι να συνδεσω τον ardupilot πανω...
_________________
«αν κλείσεις την πόρτα σου σε κάθε πλάνη, στο τέλος θα μείνει απ' έξω και η αλήθεια»
-nikos-- Admin
- Αριθμός μηνυμάτων : 2890
Ημερομηνία εγγραφής : 29/05/2013 -
Απ: Ηλεκτρονικη αγκυρα βαρκας με gps !!
από -nikos- Παρ Ιαν 19, 2018 1:56 pm
το γιατι 90% και οχι 100% θα το περιγραψω μετα την φωτο..φωτο=
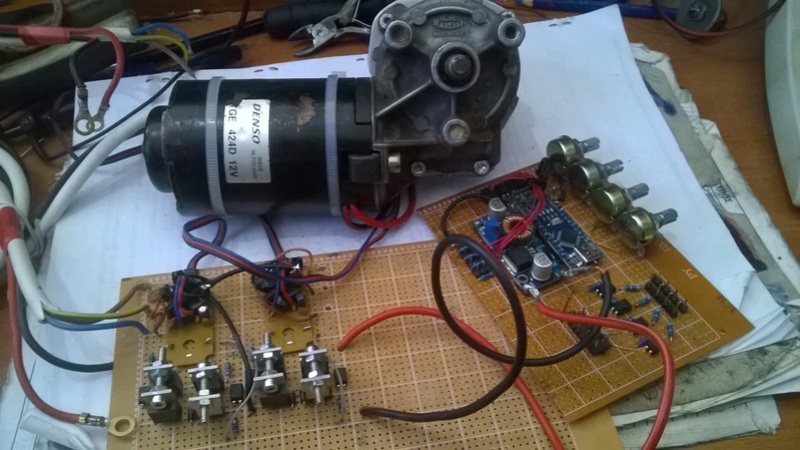
το μοτερ δουλευει 100% σαν σερβομοτερ ομως κατι δεν μου καθεται καλα..
εχει γυρω στις 160 μοίρες γωνια δεξια-αριστερα ρυθμιζομενες στην ακριβεια αλλα η γωνια περιστροφης φτανει στα ορια του ποτενσιομετρου κατι που στα απλα σερβο δεν ειναι προβλημα γιατι το αδυναμο μοτερ σταματαει στο στοπερ του ποντεσιομετρου... στο ποτενσιομετρο που εβαλα στο μοτερ υαλοκαθαριστηρα αν του ειχα βαλει στοπερ [στις φωτο πιο πανω φενεται πως το αφαιρω] θα το εσπαγε και θα το γυριζε ''σουβλακι'' ... και λογο
του οτι δεν μπορω να εμπιστευτω κανενος τυπου περα απο την πατροπαραδωτη αναλογικη ρυθμιση
θα αντικαταστησω το ποτενσιομετρο με μεταγωγικο διακοπτη και φιξ τιμες που θα φτιαξω με αντιστασεις... ετσι και θα μπορω να ρυθμισω την γωνια περιστροφης πχ,, απο 30 μοιρες εως 120 μοιρες πραγμα απαρετητο για την κινηση του λεβιε ταχυτητων που θελει στανταρ γωνια για την οπισθεν και στανταρ για το προσο [η νεκρα ειναι στην μεση]
οσο και για την περιστροφη της εξωλεμβιας...
ετσι αυτοι ειναι οι μεταγωγικοί διακοπτες =


οι διαιρετες θα ειναι λιγο σπαζοκεφαλια αλλα θα ειναι το αποτελεσμα πιο τελειο. βαζοντας
τον καταλληλο διερετη στο καταλληλο σημειο το μοτερ θα το αναγνωριζει σαν τερμα.
ειναι καλη ποιοτητα γερμανικοι και τους βλεπετε ανοιγμενους γιατι τους ανοιξα για να καταργησω το στοπερ.
παντως πιθανων να φτιαξω ενα βιντεακι ετσι οπως ειναι τωρα τα σερβομοτερ-υαλοκαθαριστηρα γιατι ειναι ιδανικοι για κατασκευη Rover παντος εδαφους οπως αυτο=
_________________
«αν κλείσεις την πόρτα σου σε κάθε πλάνη, στο τέλος θα μείνει απ' έξω και η αλήθεια»
-nikos-- Admin
- Αριθμός μηνυμάτων : 2890
Ημερομηνία εγγραφής : 29/05/2013 -
Απ: Ηλεκτρονικη αγκυρα βαρκας με gps !!
από -nikos- Παρ Ιαν 19, 2018 4:26 pm
-nikos- έγραψε:
επομενο βημα η κατασκευη του κυκλωματος οδηγησης....
βρηκα αυτο εδω σαν ετοιμο = https://www.ebay.co.uk/itm/Dual-Motor-Driver-Module-Board-H-Bridge-DC-MOSFET-IRF3205-3-36V-10A-Peak-30A-M3S/332427357899?_trkparms=5926%3AKEYWORD%7C5079%3A0
με μονο 10 ευρο καταλληλο για δυο μοτερ και μετατροπη σηματος 5 βολτ σε 12 βολτ αλλα ο μαλακας ο κινεζος δεν χρεισημοποιει PNP μοσφετ αλλα μονο NPN οπότε δεν εγκρινω !!!!θα φτιαξω δικο μου κυκλωμα...
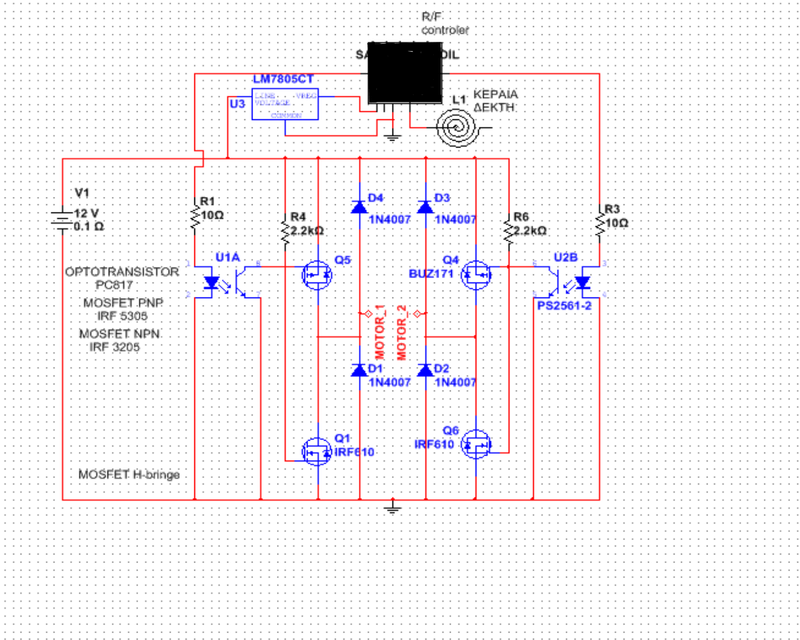
θα φτιαξω αυτο εδω το πολυ ευκολο κυκλωμα=
με την διαφορα οτι θα βαλω οπτοτρανζιστορ στην θεση των 2Ν3904
και θα προσθεσω μερικες διοδους για προστασια απο τις υπερτασεις,,,
επισεις οι R3-R4 θα μπουν 10-15 Ωμ απο 10ΚΩ που ειναι τωρα,,
οι R1-R2 θα μπουν 3Κ αντι για 1Μ ....
και τα μοσφετ θα μπουν τα IRF 3205 -και- IRF 5305......
βασικα θα φτιαξω το παραπανω κυκλωμα αλλα......θα τα αλαξω ολα χαχαχα
ετσι θα οδηγησω 12 βολτ με 5 βολτ σημα ευκολα και σιγουρα.

το κυκλωμα που χρησιμοποιησα τελικα με ολες τις αλλαγες...=
_________________
«αν κλείσεις την πόρτα σου σε κάθε πλάνη, στο τέλος θα μείνει απ' έξω και η αλήθεια»
-nikos-- Admin
- Αριθμός μηνυμάτων : 2890
Ημερομηνία εγγραφής : 29/05/2013 -
Απ: Ηλεκτρονικη αγκυρα βαρκας με gps !!
από -nikos- Τετ Φεβ 07, 2018 7:38 pm
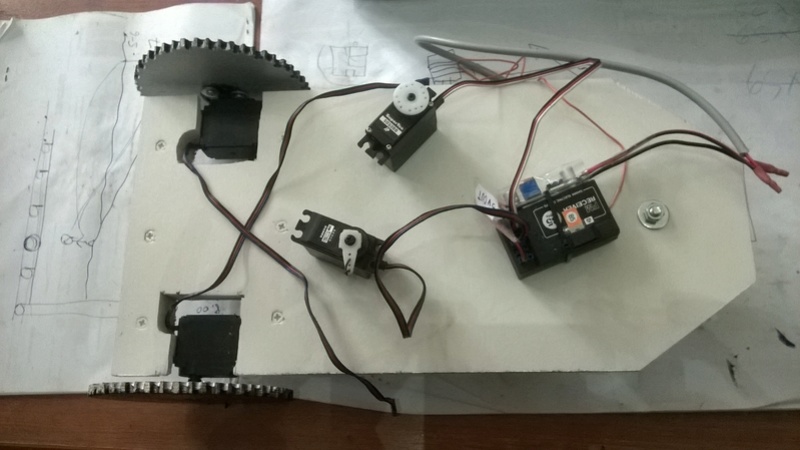
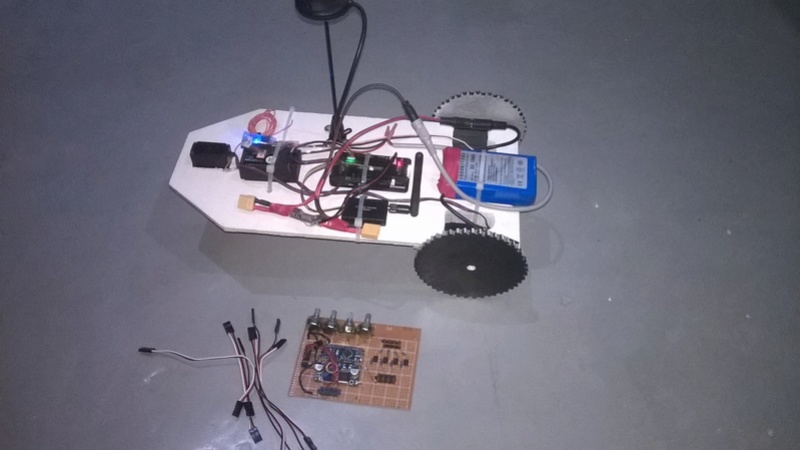
τοποθετησα τον ardupilot πανω στο ''rover'' μου.... στην πρωτη φωτο
βλεπουμε το αμαξακι και την πλακετα με την δυνατοτητα 4 εντολων που θα χρεισιμοποιηθει
για την παραμβολη των modes οπως το RTL mode ... θα προσπαθησω να φορτοσω προγραμμα απο
αεροπλανακι μηπως και μπορεσω να
εχω και τα υπολυπα modes που προσφερει το arducopter.

για την ωρα ασχολουμαι με την τροφοδοσια σε 12ν και κοινη γειωση σε ολα τα εξαρτηματα..
επισεις θελω να δοκιμασω την δυναμη του σηματος που βγαζει το ardupilot στα παλια-αναλογικα σερβο που εχω...
στην πλακετα με τα ρυθμιζομενα modes εχω προβλεψει και διαταξη ενοισχησης με οπτοτρανζιστορ για 4 σηματα.
τα σερβο των 15 κιλων που εχω παραγγηλει ειναι ψηφιακα αλλα ισως σε μακρυτερο καλωδιο να
εχει εφαρμογη η ενοισχηση
_________________
«αν κλείσεις την πόρτα σου σε κάθε πλάνη, στο τέλος θα μείνει απ' έξω και η αλήθεια»
-nikos-- Admin
- Αριθμός μηνυμάτων : 2890
Ημερομηνία εγγραφής : 29/05/2013 -
Απ: Ηλεκτρονικη αγκυρα βαρκας με gps !!
από -nikos- Τετ Φεβ 07, 2018 9:59 pm

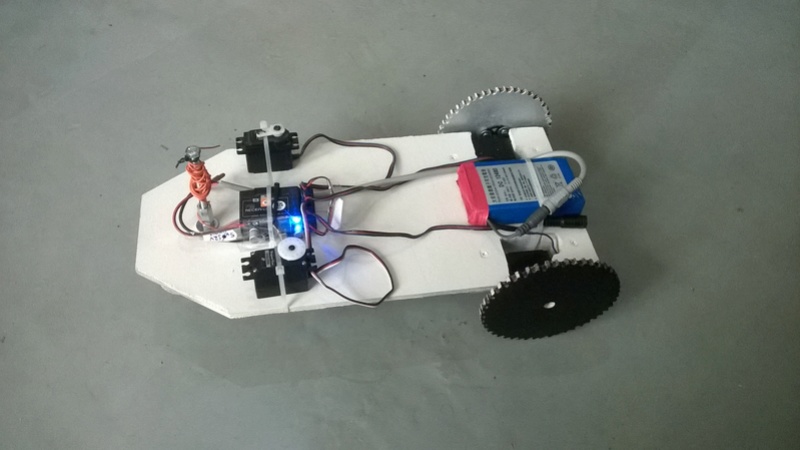
φωτο=ολα συνδεδεμενα...

εκει που ψαχνομουν πως στο καλο θα
μπει σε RTL mode μολις εκλεισα το τηλεχειριστηριο μπηκε μονο του σε ''τρανς'' και
αρχισε να
ψαχνει το σημειο εκεινησης....
επομενο πειραμα ειναι αν απλα με ενα arduino nano και εναν-δυο διακοπτες μπορω
να καταργησω εντελως την τηλεκατευθηνση
και να γινει ολο χειροκινητο...
αυτην την στιγμη το εχω ρυθμισει ωστε αν χανει την επαφη με τον χειριστη
να γυριζει στο σημειο εκκινησης-RTL mode...
επισεις εχει ενδιαφερον και το mode οπου βαζεις και σημειο ενδιαφεροντως... θα μπορουσε να ρυθμιστει
και να σε παει πχ σε ενα σημειο την νυχτα ή να σε επιστρεφει στο ''σπιτι'' σου
εκει που πχ ριχνεις την βαρκα.
ετσι και την εφαρμογη της αγκυρας θα εχει και το στιγμα του ενδιαφεροντος σου.
μολις βρω τα ''κουμπια'' του θα παραγγηλω αλλο ενα να το βαλω στο μεγαλο βαρκακι εδω=https://doityourself123.forumgreek.com/t342-topic#5923
_________________
«αν κλείσεις την πόρτα σου σε κάθε πλάνη, στο τέλος θα μείνει απ' έξω και η αλήθεια»
-nikos-- Admin
- Αριθμός μηνυμάτων : 2890
Ημερομηνία εγγραφής : 29/05/2013 -
Απ: Ηλεκτρονικη αγκυρα βαρκας με gps !!
από -nikos- Πεμ Φεβ 08, 2018 9:43 am
οπως φενεται σε
μεγαλυτερα σερβο χρειαζεται οποσδηποτε προσθετη τροφοδοσια γιατι
το συν περναει μεσω μιας ασφαλειουλας..
επισεις
μπορει να τροφοδοτηθει και χωρις το μοντουλακι του αρκει να εχουμε σταθεροποιημενα 5 βολτ...
βιντεο=
και βιντεο με την ρυθμιση των modes..
_________________
«αν κλείσεις την πόρτα σου σε κάθε πλάνη, στο τέλος θα μείνει απ' έξω και η αλήθεια»
-nikos-- Admin
- Αριθμός μηνυμάτων : 2890
Ημερομηνία εγγραφής : 29/05/2013 -
Απ: Ηλεκτρονικη αγκυρα βαρκας με gps !!
από -nikos- Παρ Φεβ 09, 2018 11:50 pm
-nikos- έγραψε:λοιπων... το προτζεκτ εχει σχεδον ολοκληρωθει... και
λεω σχεδον γιατι περιμενω τα σερβο με 15κιλα δυναμη για να ολοκληρωσω την κατασκευή και
να την τοποθετησω στην βαρκα...
λειτουργησα ''αφαιρετικα'' και κατέληξα στα εξης απαρετητα εξαρτηματα για να υπαρχει
αυτοματος πιλοτος-ηλεκτρονικη αγκυρα σε μια βαρκα.
Και βιντεο με το αποτελεσμα μεχρι στιγμης.

_________________
«αν κλείσεις την πόρτα σου σε κάθε πλάνη, στο τέλος θα μείνει απ' έξω και η αλήθεια»
-nikos-- Admin
- Αριθμός μηνυμάτων : 2890
Ημερομηνία εγγραφής : 29/05/2013 -
Απ: Ηλεκτρονικη αγκυρα βαρκας με gps !!
από okyalos Σαβ Φεβ 10, 2018 1:42 pm
okyalos- Αριθμός μηνυμάτων : 24
Ημερομηνία εγγραφής : 28/12/2015
Απ: Ηλεκτρονικη αγκυρα βαρκας με gps !!
από -nikos- Πεμ Φεβ 15, 2018 6:08 pm
-nikos- έγραψε:
θα σας πω,, αυτο που εσεις βλεπετε σαν τηλεχειρισμο-στανταρ λειτουργειες-μικροελενκτες-προγραμματα υπολογιστη-κλπ.
εγω
το βλεπω σαν συχνοτητες και ευρος παλμου pwm με τον παλμογραφο.....
και το σχετικο βιντεο με τις πλακετες που εμφανιζονται στις παραπανω φωτο=
_________________
«αν κλείσεις την πόρτα σου σε κάθε πλάνη, στο τέλος θα μείνει απ' έξω και η αλήθεια»
-nikos-- Admin
- Αριθμός μηνυμάτων : 2890
Ημερομηνία εγγραφής : 29/05/2013 -
Απ: Ηλεκτρονικη αγκυρα βαρκας με gps !!
από -nikos- Τρι Φεβ 27, 2018 9:22 pm
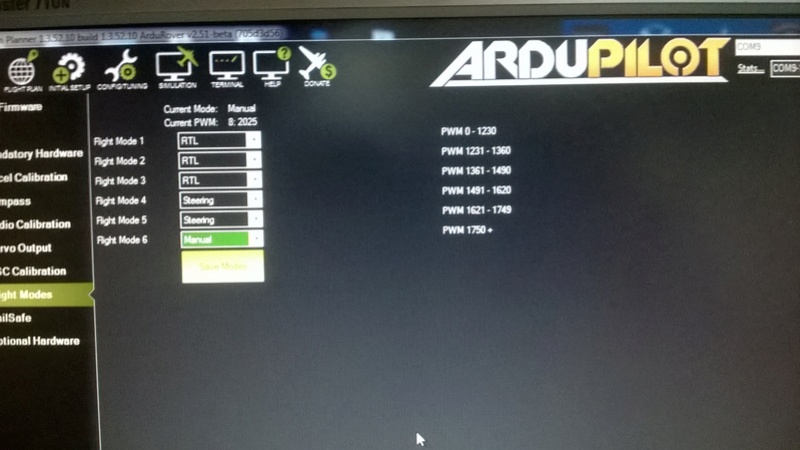
πιν 8 = modes
πιν 1 = τιμόνι
πιν 3 = γκάζι-ή πρόσω-όπισθεν
για σωστη λειτουργεια του stering mode αν θελουμε να χρεισιμοποιησουμε το RTL με την οπισθεν εχει και stering mode σωστο στην οπισθεν
αν το RTL ειναι ρυθμισμενο προς τα εμπρος τοτε και το stering mode δουλευει σωστα προς τα εμπρος ,
αν θελουμε να εχουμε σωστο stering mode προς τα εμπρος και σωστο RTL προς τα πισω
πρεπει να υπαρχει η δυνατοτητα invert στο σημα του τιμονιου.
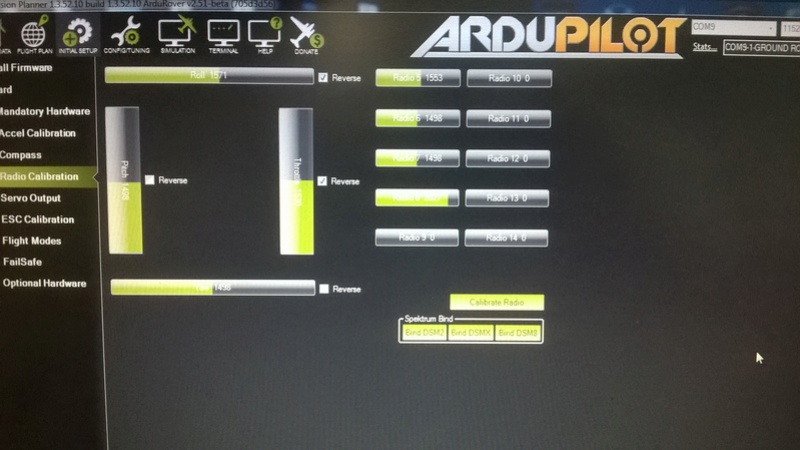
ρυθμιση modes και servo..
κωδικας
#include
//define our servos
Servo servo1;
Servo servo2;
Servo servo3;
Servo servo4;
Servo servo5;
//define joystick pins (Analog)
int joyX = 0;
int joyY = 1;
int joyb = 3;
int joyd = 4;
int joyVal;
int joyXState = 0;
void setup ()
{
//attaches our servos on pins PWM 3-5
servo1.attach(3);
servo2.attach(5);
servo3.attach(6);
servo4.attach(10);
}
void loop ()
{
//read the value of joystick (betwen 0-1023)
joyVal = analogRead(joyX);
joyVal = map(joyVal, 0, 1023, 0, 180); //servo value betven 0-180
servo1.write(joyVal);//set the servo position acording to the joystick value
joyXState = analogRead(joyX);// ΔΙΑΒΑΖΕΙ ΤΟ joyXState
if(joyXState>=130 && joyXState<=450) //
// ΑΝ ΑΠΛΑ ΘΕΛΟΥΜΕ ΑΠΟ ΚΑΠΟΙΑ ΤΙΜΗ ΚΑΙ ΠΑΝΩ ΘΑ ΒΑΛΟΥΜΕ ΤΟ if(joyXState>=110)
// ΠΧ 110 ΚΑΙ ΑΝΩ
// ΑΝ ΘΕΛΟΥΜΕ ΟΡΙΟ ΑΝΩΤΕΡΗΣ ΚΑΙ ΚΑΤΩΤΕΡΗΣ ΤΙΜΗΣ ΒΑΖΟΥΜΕ if(joyXState>=10 && joyXState<=110)
// ΚΑΤΩΤΕΡΟ ΟΡΙΟ ΤΟ ΠΧ 10 ΚΑΙ ΑΝΩΤΕΡΟ ΤΟ 110
{
delay(12000);
joyVal = analogRead(joyX);
joyVal = map(joyVal, 70, 70, 70, 70);
servo1.write(joyVal);
delay(50);
joyVal = analogRead(joyX);
joyVal = map(joyVal, 80, 80, 80, 80);
servo1.write(joyVal);
delay(50);
joyVal = analogRead(joyX);
joyVal = map(joyVal, 90, 90, 90, 90);
servo1.write(joyVal);
delay(50);
joyVal = analogRead(joyX);
joyVal = map(joyVal, 100, 100, 100, 100);
servo1.write(joyVal);
delay(50);
joyVal = analogRead(joyX);
joyVal = map(joyVal, 110, 110, 110, 110);
servo1.write(joyVal);
delay(40);
joyVal = analogRead(joyX);
joyVal = map(joyVal, 120, 120, 120, 120);
servo1.write(joyVal);
delay(30);
joyVal = analogRead(joyX);
joyVal = map(joyVal, 130, 130, 130, 130);
servo1.write(joyVal);
delay(20);
joyVal = analogRead(joyX);
joyVal = map(joyVal, 140, 140, 140, 140);
servo1.write(joyVal);
delay(10);
joyVal = analogRead(joyX);
joyVal = map(joyVal, 150, 150, 150, 150);
servo1.write(joyVal);
delay(5);
joyVal = analogRead(joyX);
joyVal = map(joyVal, 160, 160, 160, 160);
servo1.write(joyVal);
delay(5);
joyVal = analogRead(joyX);
joyVal = map(joyVal, 170, 170, 170, 170);
servo1.write(joyVal);
delay(5);
joyVal = analogRead(joyX);
joyVal = map(joyVal, 180, 180, 180, 180);
servo1.write(joyVal);
} else {
}
delay(5);
joyVal = analogRead(joyY);
joyVal = map (joyVal, 0, 1023, 10, 180);//
servo2.write(joyVal);
delay(5);
joyVal = analogRead(joyb);
joyVal = map (joyVal, 0, 1023, 10, 180);
servo3.write(joyVal);
delay(5);
joyVal = analogRead(joyd);
joyVal = map (joyVal, 0, 1023, 10, 180);
servo4.write(joyVal);
delay(5);
}
Έχει επεξεργασθεί από τον/την -nikos- στις Πεμ Μαρ 02, 2023 9:50 am, 1 φορά
_________________
«αν κλείσεις την πόρτα σου σε κάθε πλάνη, στο τέλος θα μείνει απ' έξω και η αλήθεια»
-nikos-- Admin
- Αριθμός μηνυμάτων : 2890
Ημερομηνία εγγραφής : 29/05/2013 -
Απ: Ηλεκτρονικη αγκυρα βαρκας με gps !!
από -nikos- Τετ Μαρ 07, 2018 5:37 pm
τωρα προχωράω στο ''μηχανικο'' μερος...
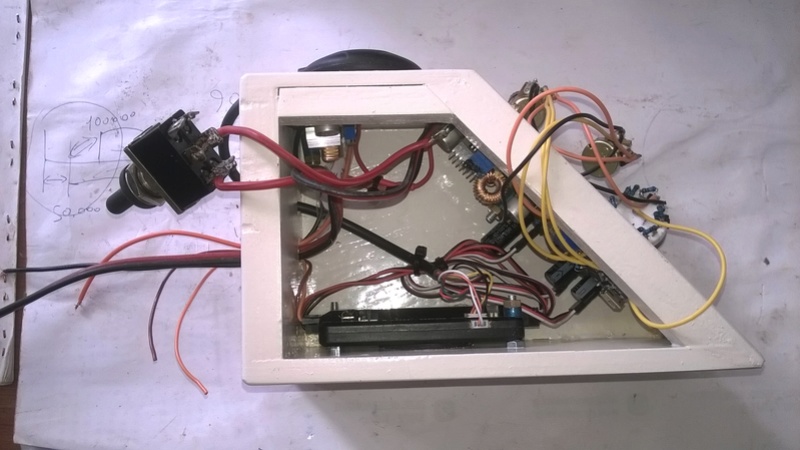
εφτιαξα το κουτι του αυτοματου πιλοτου και πρεπει να βαλω αυτα τα εξαρτηματα μεσα....
φωτο=

την προσοψη θα την κανω διαφανη με φαιμπεργκλας ωστε και να ''γουσταρω'' βλεποντας
ολα τα εξαρτήματα και τα καλωδια αλλα και για να βλέπω τις ενδεικτικες λυχνίες που εχουν ολα τα εξαρτήματα...
θα έχει φάση....
τα εβαλα=

ένταξή,, εύκολο ηταν....
_________________
«αν κλείσεις την πόρτα σου σε κάθε πλάνη, στο τέλος θα μείνει απ' έξω και η αλήθεια»
-nikos-- Admin
- Αριθμός μηνυμάτων : 2890
Ημερομηνία εγγραφής : 29/05/2013 -
Απ: Ηλεκτρονικη αγκυρα βαρκας με gps !!
από -nikos- Πεμ Μαρ 08, 2018 6:14 pm


στις φωτο βλεπετε δυο τροφοδοτικα γιατι τα σερβο αποδειδουν ολη την δυναμη τους στα 7 βολτ ετσι εχουν ξεχωριστό τροφοδοτικο απο το τροφοδοτικο του ardupilot και arduino nano που δουλευουν στα 5 βολτ.
τωρα σειρα εχει η τοποθετηση των σερβο στην μηχανη...
_________________
«αν κλείσεις την πόρτα σου σε κάθε πλάνη, στο τέλος θα μείνει απ' έξω και η αλήθεια»
-nikos-- Admin
- Αριθμός μηνυμάτων : 2890
Ημερομηνία εγγραφής : 29/05/2013 -
Απ: Ηλεκτρονικη αγκυρα βαρκας με gps !!
από -nikos- Τετ Μαρ 14, 2018 11:06 am
να δουλευει αλλιως απο ολη την υπολυπη κατασκευη....

ο χωρος ειναι πολυ περιορισμενος.... τελικα την βρηκα την λυση αλλα
πιο ευκολο ειναι
αν καποιος το επαναλαβει να χρησιμοποιησει τις ντιζες-εξοπλισμο απο τιμονιερα,, [αν εχει ηδη τιμονιερα ειναι ακομη πιο ευκολα]
εγω τελικα θα βαλω δυο σερβο πανω στην εξωλεμβια για να αλαζει τις ταχυτητες
και το δεξια-αριστερα θα το κανω απο σταθερο σερβο πανω στην βαρκα.
για το σταθερο σερβο χρησιμοποιησα το ενα μοτερ υαλοκαθαριστηρα βελτιωνοντας στο μεγιστο
την κατασκευη...
βασικο σημειο ειναι το διπλό ποτενσιομετρο για την αναφορα σημειου περιστροφης=

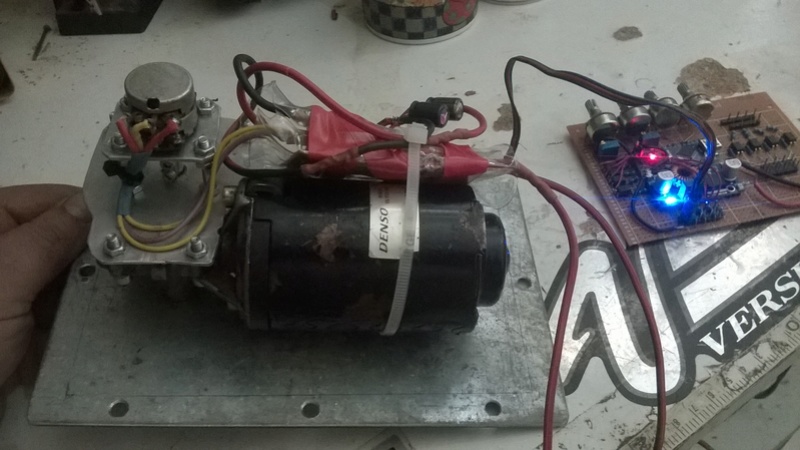
το διπλο ποτενσιομετρο μειωσε κατα πολυ την περίπτωση να εχουμε αποτυχια αναγνωσης δειγματος...παραλληλησα τις δυο πλευρες του ωστε να συμπεριφερεται σαν ενα ποτενσιομετρο.
η μεταλικη βαση που φενεται κατω απο το σερβομηχανισμο ειναι μερος του κουτιου που εχω ηδη κατασκευάσει.
[τωρα πευτει βαψιμο]
το αποτελεσμα πιστευω οτι θα ειναι πολυ λιτο και διακριτικο. φυσικα οταν ολοκληρωθει
θα γυρισω βιντεο στην θαλασσα.
_________________
«αν κλείσεις την πόρτα σου σε κάθε πλάνη, στο τέλος θα μείνει απ' έξω και η αλήθεια»
-nikos-- Admin
- Αριθμός μηνυμάτων : 2890
Ημερομηνία εγγραφής : 29/05/2013 -
Απ: Ηλεκτρονικη αγκυρα βαρκας με gps !!
από -nikos- Δευ Απρ 09, 2018 2:04 pm
το πρωτο βιντεο πριν μπει στην θαλασσα=
_________________
«αν κλείσεις την πόρτα σου σε κάθε πλάνη, στο τέλος θα μείνει απ' έξω και η αλήθεια»
-nikos-- Admin
- Αριθμός μηνυμάτων : 2890
Ημερομηνία εγγραφής : 29/05/2013 -
Απ: Ηλεκτρονικη αγκυρα βαρκας με gps !!
από -nikos- Τρι Απρ 10, 2018 8:00 am
_________________
«αν κλείσεις την πόρτα σου σε κάθε πλάνη, στο τέλος θα μείνει απ' έξω και η αλήθεια»
-nikos-- Admin
- Αριθμός μηνυμάτων : 2890
Ημερομηνία εγγραφής : 29/05/2013 -
okyalos- Αριθμός μηνυμάτων : 24
Ημερομηνία εγγραφής : 28/12/2015
Απ: Ηλεκτρονικη αγκυρα βαρκας με gps !!
από Antonis_fbi Παρ Ιουλ 26, 2019 12:59 am
Antonis_fbi- Αριθμός μηνυμάτων : 16
Ημερομηνία εγγραφής : 02/04/2019
Απ: Ηλεκτρονικη αγκυρα βαρκας με gps !!
από -nikos- Παρ Ιουλ 26, 2019 8:26 am
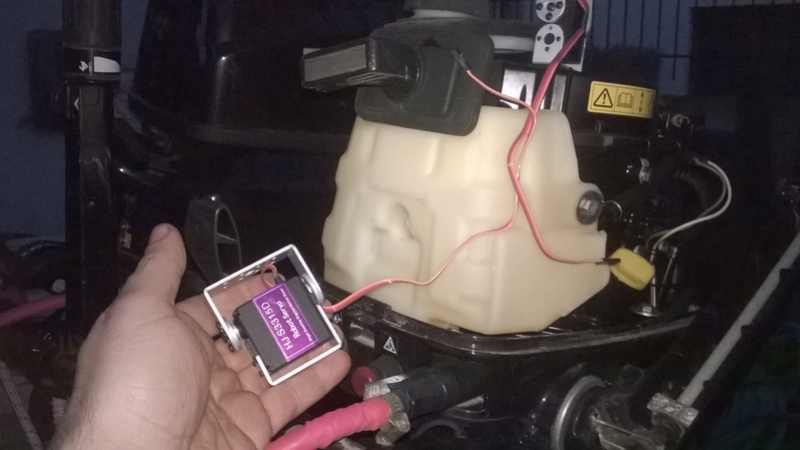
τα δυο σερβο που ειχα βαλει ηταν οριακα σε δυναμη για να βαζουν την ταχυτητα αν και τα τροφοδοτουσα με 7,5ν και τα ειχα βαλει στο σημειο οπου συνδεεται κανονικα η ντιζα της τιμονιερας στο πλαι της μηχανης,,τελικα
το ενα εκ των δυο σερβο χαλασε και τα αφερεσα και τα δυο αντικαθηστοντας τα με ενα μπιπερ στο καντραν του GPS το οποιο οταν φτανει στο σημειο μηδεν το σκαφος με ειδοποιει και βγαζω χειροκινητα την ταχυτητα...
ετσι το σκαφος οδηγηται μεν ηλεκτρονικα αλλα πρωσο-νεκρα-οπισθεν τα βαζω χειροκινητα.
αν το ξαναφτιαχνα με ηλεκτρονικες τις ταχυτητες θα εβαζα εναν λινεαρ ακουατορ σε αλλο σημειο του σκαφους με μια ντιζα να οδηγηται στις ταχυτητες στην εξωλέμβια.
_________________
«αν κλείσεις την πόρτα σου σε κάθε πλάνη, στο τέλος θα μείνει απ' έξω και η αλήθεια»
-nikos-- Admin
- Αριθμός μηνυμάτων : 2890
Ημερομηνία εγγραφής : 29/05/2013 -
Απ: Ηλεκτρονικη αγκυρα βαρκας με gps !!
από Antonis_fbi Παρ Ιουλ 26, 2019 8:56 am
Antonis_fbi- Αριθμός μηνυμάτων : 16
Ημερομηνία εγγραφής : 02/04/2019
Απ: Ηλεκτρονικη αγκυρα βαρκας με gps !!
από -nikos- Παρ Ιουλ 26, 2019 12:57 pm
το σερβο εχει το μηδεν-μεση και αριστερα-δεξια....Antonis_fbi έγραψε: (δεν ξέρω πως να το τοποθετήσω για να εκμετάλλευτω τισ μοίρες και να κάνει ψαλίδι)και ένα λινεαρ ακτουειτορ για το τιμόνι.ολα αυτά θα ελέγχονται από ποτενσιομετρα μέσω arduino.
εφοσον λες οτι θα βαλεις διακοπτη με στανταρ αντιστασεις θα φτιαξεις πρωτα την κατασκευη και μετα θα βαλεις την
καταλληλη αντισταση για προσο και την καταλληλη αντισταση για οπισθεν.
θα βαλεις λινεαρ σερβο και στις ταχυτητες με ντιζα.....
βασικα εγω τα σερβο μου τα φτιαχνω μονος μου οπως ειδες,, οποτε δειξε μου τι εχεις αγορασει να δουμε τι μπορει να γινει.
_________________
«αν κλείσεις την πόρτα σου σε κάθε πλάνη, στο τέλος θα μείνει απ' έξω και η αλήθεια»
-nikos-- Admin
- Αριθμός μηνυμάτων : 2890
Ημερομηνία εγγραφής : 29/05/2013 -
Απ: Ηλεκτρονικη αγκυρα βαρκας με gps !!
από Antonis_fbi Παρ Ιουλ 26, 2019 5:09 pm
Antonis_fbi- Αριθμός μηνυμάτων : 16
Ημερομηνία εγγραφής : 02/04/2019
Σελίδα 1 από 5 • 1, 2, 3, 4, 5
» αλλαγη πατώματος βάρκας [στεγανά]
» αντικατασταση τροχου με μεγαλυτερο σε τρειλερ βαρκας
|
|
|