
arduino project
Σελίδα 2 από 3 •  1, 2, 3
1, 2, 3
Απ: arduino project
από -nikos- Σαβ Ιαν 23, 2016 8:35 pm
αφου πηρα τα ''πλακετακια'' πριν αρχισω να τα συνδεω και να φτιαχνω
κωδικες
επισκευτηκα
την σελιδα που περιγραφει ''πως να καταστρεψετε ενα αρντουινο''....
η σελιδα ειναι αυτη =
http://www.rugged-circuits.com/10-ways-to-destroy-an-arduino/
και λιγο-πολυ λεει τα εξης= οτι αν οποιοδηποτε πιν συνδεθει κατα λαθος με την γειωση ή σε κανα τρανζιστορ χωρις αντισταση τοτε
τσουφφφφφφφ παει το αρντουινο...

μετα ο επομενος τροπος να το ''καψεις'' ειναι να οδηγησεις πανω απο 5 βολτ σε ενα απο τα πιν του [εκτός απο ενα μονο που ειναι για τροφοδοσια..]
η λυση που δινει το σαιτ ειναι η τοποθετηση αντιστασεων και μιας ζενερ 5ν σε καθε πιν... ή τουλαχιστον
στα πιν που θα χρεισιμοποιησουμε...
συνηθως στις πιο πολλες κατασκευες δεν χρεισιμοποιουμε πανω απο 6-8 πιν
ομως για να φτιαξουμε τον κωδικα και να τον δοκιμασουμε χρειαζεται ενα ''πεδιο'' δοκιμων...
οι περισσοτεροι
προτινουν ενα μπρεντ-μπορντ ομως δεν ειναι ιδιετερα ευχρηστο....
αντιθετα αν εχεις μια μονιμη πλακετα ετοιμη για ''πολεμο'' τοτε ειναι πιστευω ευκολοτερο να πειραματιστεις...
αλωστε πρεπει καθε πιν που θα χρεισιμοποιησεις να το ''δεις'' στον παλμογραφο για να εισαι
σιγουρος οτι κανει αυτο που θες να κανει...[οσοι δεν εχετε παλμογραφο ''παιξτε'' καλυτερα με ηδη εφαρμοσμενες κατασκευες,,,]
ετσι εφτιαξα την παρακατω κατασκευη =
πηρα ενα αρντουινο και το τοποθετησα πανω σε μια πλακετα χωρις να κολησω τα πιν του σε αυτο αλλα
μονο στην πλακετα..


μετα κολησα αλλα πιν στο αρντουινο


τα τρια εσωτερικα πιν τα συνδεσα με 3 καλωδιακια....

αργοτερα ομως ειδα οτι δεν χρειαζονται και τα τρια αλλα μονο το μεσαιο
οποτε αφερεσα τα δυο ακριανά καλωδια...

ετσι προχωρισα στη συνδεση των υπολυπων πιν...με λιγο φλουξ στα πιν...

πριν την ενωση...

μετα την ενωση....

χρησιμοποιησα συνδιασμο αντιστασεων 47 Ωμ και 10 Ωμ...

ομως δεν ειχα ζενερ των 5 βολτ.... οπωτε θα περιμενω λιγο μεχρι να ερθουν...
ομως το τελικο ''πεδιο δωκιμων'' ειναι θα λεγα ετοιμο και μπορει να
χρησιμοποιηθει με λιγη προσοχη απο τωρα...
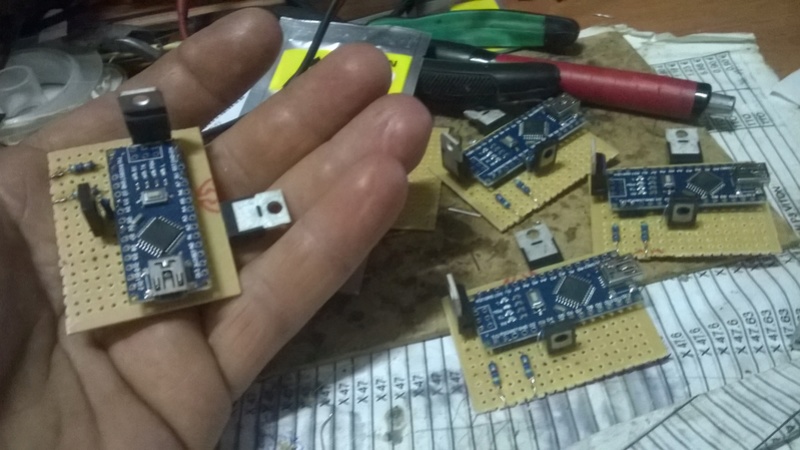
φωτο τελικου αποτελεσματος =



και με το καλωδιακι του και με τα ''ουλλα'' του...
 μερακλιδικη πλακετα...
μερακλιδικη πλακετα... εβαλα και τα ποντεσιομετρα του να τσεκαρω τα PWM και περιμενω τις ζενερ για να συνδεσω τροφοδοσια και γειωση... [στο πιν 30 θα του βαλω ενα 7809..]


_________________
«αν κλείσεις την πόρτα σου σε κάθε πλάνη, στο τέλος θα μείνει απ' έξω και η αλήθεια»

-nikos-- Admin
- Αριθμός μηνυμάτων : 2960
Ημερομηνία εγγραφής : 29/05/2013 -

Απ: arduino project
από -nikos- Δευ Ιαν 25, 2016 8:17 pm
ετσι σημερα ερευνησα τον κωδικα που ειχα φτιαξει για τριπλο pwm με τρια ποντεσιομετρα...
ακολουθησα πιστα τις φωτο με τα πιν που ανεβασα πιο πανω και ετσι διορθωσα τον
κωδικα
και τον ανεβαζω εδω =
int sensorValue;
void setup()
{
pinMode(6, OUTPUT);
}
void loop()
{
sensorValue = analogRead(4);
analogWrite(6, sensorValue / 4);
//analogWrite(37, 1023 - sensorValue);
// The delay can be change to get the desired dimming effect
delay(10);
sensorValue = analogRead(3);
analogWrite(5, sensorValue / 4);
//analogWrite(37, 1023 - sensorValue);
// The delay can be change to get the desired dimming effect
delay(10);
sensorValue = analogRead(5);
analogWrite(3, sensorValue / 4);
//analogWrite(37, 1023 - sensorValue);
// The delay can be change to get the desired dimming effect
delay(10);
}
τον δοκίμασα κιόλας.... =

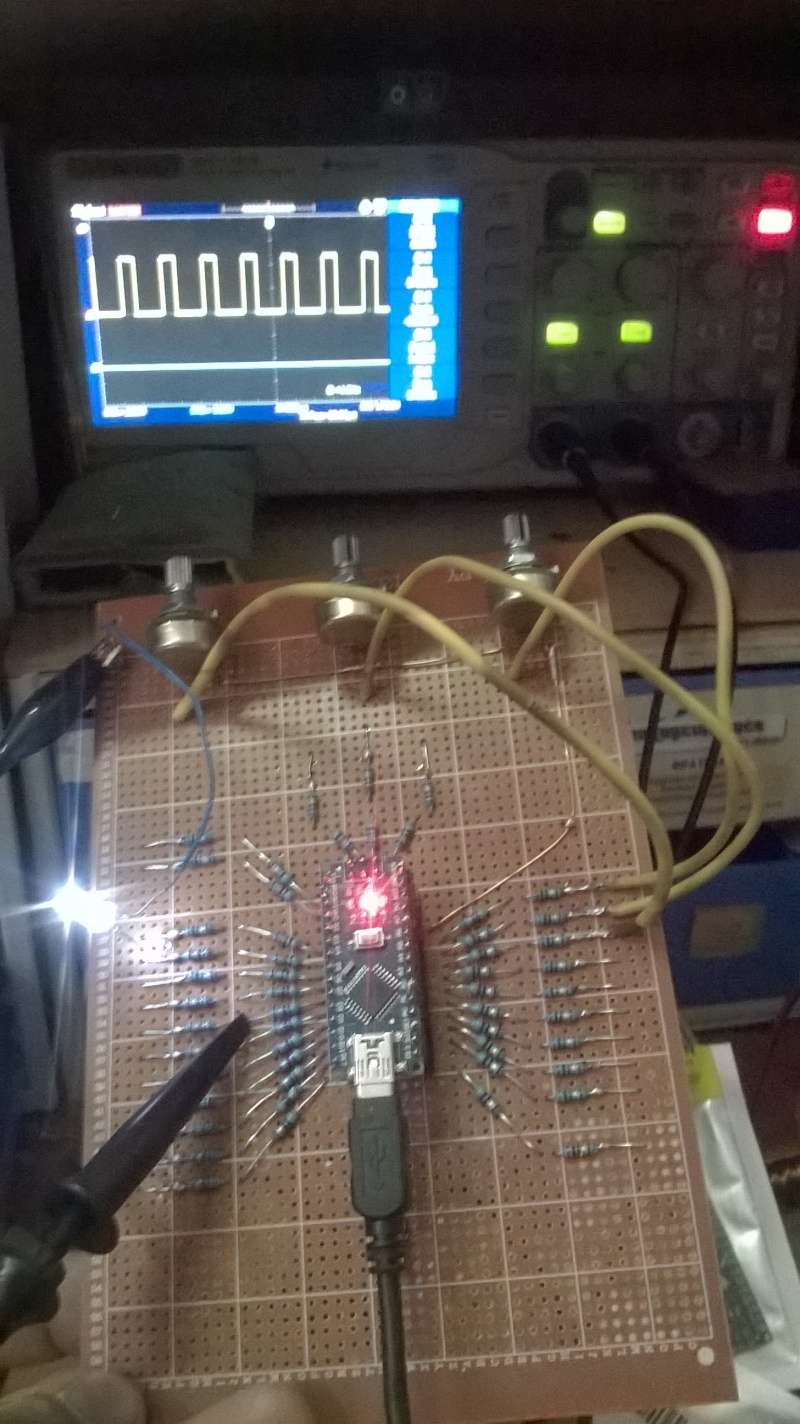
εδω ρυθμηζω 3 διαφορετικα PWM με 3 ποντεσιομετρα.....
θα παιξω λιγο ακομη με αυτον τον κωδικα ωστε να ρυθμηζω 3 PWM με ενα ποντεσιομετρο
ουτοσωστε
οταν αυξανεται ο παλμος στο ενα να μειώνεται στο αλλο....

στην φωτο φαίνεται το ντιμαρισμα των 3 λεντ οπου ενα εχει πλήρη φωτεινότητα το δευτερο την μιση και το τριτο ελαχιστη.....
επομενος στοχος η τροποποιηση της συχνοτητας μιας και το PWM ''επαιζε'' στο 1ΚΗΖ και
σκοπευω να φτιαξω ενα ινβερτερ των 12ν-220ν με πυρηνα το αρντουινο.
ετσι εφωσον ''βρηκα'' το PWM και την αναδραση το μονο που μενει ειναι η συχνοτητα....
και ασε κατι αλλους να.......''κυβιζουν κυβισμενες δεξαμενές'' χαχαχα

φυσικα ο κωδικας θα ειναι free
_________________
«αν κλείσεις την πόρτα σου σε κάθε πλάνη, στο τέλος θα μείνει απ' έξω και η αλήθεια»
-nikos-- Admin
- Αριθμός μηνυμάτων : 2960
Ημερομηνία εγγραφής : 29/05/2013 -
Απ: arduino project
από -nikos- Τρι Φεβ 02, 2016 2:38 pm
-nikos- έγραψε:και ασε κατι αλλους να.......''κυβιζουν κυβισμενες δεξαμενές'' χαχαχα
καποιοι που κυβιζουν κυβισμενες δεξαμενες παρεξηγηθηκαν και κανανε ''παρεμβαση'' μεσω π.μ...
η φαση ειναι οτι
το φορουμ το παρακολουθουν και φιλοι και καποιοι που πιστευουν οτι ''μπενουμε στα χωραφια τους''
για τους δεύτερους [κυριολεκτικά] δεν μπορουμε να κανουμε τιποτα,,,,ειναι και θα ειναι παντα ''δευτεροι''
για τους πρωτους ομως [τους φιλους] κανουμε και θα συνεχισουμε να κανουμε οτι μπορουμε...
και επειδη ενα απο τα κοψιματα της παρεμβασης ηταν το αν θα εχω στο παρων θεμα προγραμμα απο ινβερτερ
εχω να πω οτι ΝΑΙ εχω...
απο το DYI 123
κωδικας ινβερτερ που δουλευει=
#define MOSFET1 9
#define MOSFET2 10
#define EnablePower 2 // HV power on switch
#define batteryVoltage 0 // Ad0
#define heatSink 1 // Ad1
#define batteryGoodInd 12
#define fanOnInd 11
#define HVON 13 // high voltage on blinks
int x = 0; int y = 0; int z = 0;
void setup() {
pinMode(MOSFET1, OUTPUT); // MOSFET 1
pinMode(MOSFET2, OUTPUT); // MOSFET 2
pinMode(EnablePower, INPUT); // N.O. switch
digitalWrite(EnablePower, HIGH); // pull up enabled
pinMode(HVON, OUTPUT);
digitalWrite(HVON, LOW);
pinMode(batteryGoodInd, OUTPUT);
digitalWrite(batteryGoodInd, LOW);
pinMode(fanOnInd, OUTPUT);
digitalWrite(fanOnInd, LOW);
}
void loop() {
y = analogRead(batteryVoltage);
if (y > 150) digitalWrite(batteryGoodInd, LOW);
// battery LED off
else digitalWrite(batteryGoodInd, HIGH);
// battery too low LED on
if (analogRead(heatSink) > 500) digitalWrite(fanOnInd, HIGH);
// cooling fan on
else digitalWrite(fanOnInd, LOW);
// cooling fan off
if ((digitalRead(EnablePower) == 0) && (y > 150)) {
// check for closed enable switch, battery state
SoftStart(); // bring power up slowly
while ((digitalRead(EnablePower) == 0) && (y > 150)) {
digitalWrite(MOSFET1, HIGH); // MOSFET1 on
delayMicroseconds(360);
delay(
digitalWrite(MOSFET1, LOW); // MOSFET1 off
digitalWrite(MOSFET2, HIGH); // MOSFET2 on
delayMicroseconds(360);
delay(
digitalWrite(MOSFET2, LOW); // MOSFET2 off
x++;
if (x == 20) { // flash HVON LED
toggle(HVON);
y = analogRead(0);
x=0;
if (analogRead(heatSink) > 500) digitalWrite(fanOnInd, HIGH);
// cooling fan on
else digitalWrite(fanOnInd, LOW);
// cooling fan off
} // end 2nd if
} // end while
} //
} // end loop
void toggle(int pinNum) {
// toggle the state on a pin
int pinState = digitalRead(pinNum);
pinState = !pinState;
digitalWrite(pinNum, pinState);
}
//SoftStart allows power to come up slowly to prevent excessive surges
// time is about 2 seconds
void SoftStart(void) {
int y = 2;
int x = 0;
int z = 6;
while (y <
digitalWrite(MOSFET1, HIGH); // MOSFET1 on
delayMicroseconds(360);
delay(y); // wait for 8.3 mS
digitalWrite(MOSFET1, LOW); // MOSFET1 off
delay(z);
digitalWrite(MOSFET2, HIGH); // MOSFET2 on
delayMicroseconds(360);
delay(y); // wait for 8.3 mS
digitalWrite(MOSFET2, LOW); // MOSFET2 off
delay(z);
x++;
if (x == 30) {
y = y + 2;
z = z - 2;
x=0;
}
}
}
-------------------------------------------------------------
στα πιν D9 - D10 ειναι η εξοδος των μοσφετ.
στο πιν D11 ειναι η έξοδος του βεντιλατερ και στο πιν Α1 η εισοδος του θερμοστατη του βεντιλατερ.
στο πιν Α0 ειναι το δειγμα τασης της μπαταριας που στον κωδικα εχει προνωησει να κλεινει οταν ''πεσει'' η μπαταρια κατω απο τα πχ 10 βολτ,, αυτο το ρυθμηζουμε με τριμερ στο πιν Α0
και στο πιν D2 μπενει ο διακοπτης.
τον παραπανω κωδικα τον βρηκα ετοιμο στο διαδικτιο.... τον δοκιμασα στην πλακετα δοκιμων μου
και δουλευει αψογα.
ειναι φτιαγμενος για κατασκευη με δυο μετασχηματιστες,, και δεν εχει αναδραση,,, οταν του βαλω και αναδραση ωστε να δουλευει και με ενα μετασχηματιστη θα τον ανεβασω εκ νεου.
ναι αγαπητε ,, σημερα ζουμε σε μια νεα εποχη οπου μπορει το αρντουινο να το λεμε αντρουινο
αλλα αυτο δεν μας αποτρεπει απο το
να φτιαξουμε τις κατασκευες μας οπως και αν τις προφερουμε.

Έχει επεξεργασθεί από τον/την -nikos- στις Τετ Φεβ 03, 2016 6:05 pm, 1 φορά
_________________
«αν κλείσεις την πόρτα σου σε κάθε πλάνη, στο τέλος θα μείνει απ' έξω και η αλήθεια»
-nikos-- Admin
- Αριθμός μηνυμάτων : 2960
Ημερομηνία εγγραφής : 29/05/2013 -
Απ: arduino project
από -nikos- Σαβ Απρ 30, 2016 8:12 pm
χθες αποφάσισα ότι ήταν ώρα για να γυρίσω ένα βίντεο με
όσα περιγράφω στα προηγούμενα ποστ,, για να βοηθηθούν όσο γίνεται περισσότεροι φίλοι....
Το βιντεο=
Αρντουινο-σπαστε τον κωδικα
enjoy

_________________
«αν κλείσεις την πόρτα σου σε κάθε πλάνη, στο τέλος θα μείνει απ' έξω και η αλήθεια»
-nikos-- Admin
- Αριθμός μηνυμάτων : 2960
Ημερομηνία εγγραφής : 29/05/2013 -
Απ: arduino project
από -nikos- Δευ Ιουλ 11, 2016 11:00 pm
 για ρυθμιστές φωτεινότητας για λεντ λάμπες....
για ρυθμιστές φωτεινότητας για λεντ λάμπες....
_________________
«αν κλείσεις την πόρτα σου σε κάθε πλάνη, στο τέλος θα μείνει απ' έξω και η αλήθεια»
-nikos-- Admin
- Αριθμός μηνυμάτων : 2960
Ημερομηνία εγγραφής : 29/05/2013 -
Απ: arduino project
από -nikos- Σαβ Αυγ 06, 2016 10:15 am
ευθης αμεσως εφτιαξα και ενα ρανταρ παρκαρισματος με 8 λεντ..
τζακ κλικ, παρήγγειλα και ενα για σενα !!! οποτε βρης χρονο περνα να τα πουμε...


εδω το εχω στην πλακετα δοκιμων μου... οταν το φτιαξω
πανελακι θα ανεβασω και βιντεο..
_________________
«αν κλείσεις την πόρτα σου σε κάθε πλάνη, στο τέλος θα μείνει απ' έξω και η αλήθεια»
-nikos-- Admin
- Αριθμός μηνυμάτων : 2960
Ημερομηνία εγγραφής : 29/05/2013 -
Απ: arduino project
από TZAK KLIK Σαβ Αυγ 06, 2016 6:23 pm
Οντος, εχουμε καιρό να τα πουμε, και έχουνε μαζευτεί πολά.....
Ισως την Δευτέρα να κανω μια απόπειρα να ανέβω.

_________________
What seems impossible today may be possible tomorrow

TZAK KLIK- Αριθμός μηνυμάτων : 291
Ημερομηνία εγγραφής : 18/06/2013
Απ: arduino project
από -nikos- Τετ Αυγ 10, 2016 2:24 pm
φυσικα ο κωδικας θα ειναι free
Οπως υποσχεθηκα......!!!!

μετετρεψα τον κωδικα για λεντ σε κωδικα για ινβερτερ καθαρου ιμητονου !!!!!! με αναδραση και με τα ουλα του...
ο κωδικας=
int sensorValue;
void setup()
{
pinMode(5, OUTPUT);//MOSFET DRIVER 1
pinMode(6, OUTPUT);//MOSFET DRIVER 2
//FEEDBACK ON PIN A4
}
void loop()
{
analogWrite(6,HIGH);
analogWrite(5,LOW);
sensorValue = analogRead(4);//FEEDBACK ON PIN A4
analogWrite(6, sensorValue / 4);
//analogWrite(37, 1023 - sensorValue);
delay(9); //The delay can be change to get the desired frequency
analogWrite(6,LOW);
analogWrite(5,LOW);
delay(1);
analogWrite(6,LOW);
analogWrite(5,HIGH);
sensorValue = analogRead(4);//FEEDBACK ON PIN A4
analogWrite(5, sensorValue / 4);
//analogWrite(37, 1023 - sensorValue);
delay(9); //The delay can be change to get the desired frequency
analogWrite(6,LOW);
analogWrite(5,LOW);
delay(1);
}
---------------------------------------------
ετσι,,, με αγαπη σε ολους...
Έχει επεξεργασθεί από τον/την -nikos- στις Δευ Ιουλ 23, 2018 7:58 am, 2 φορές συνολικά
_________________
«αν κλείσεις την πόρτα σου σε κάθε πλάνη, στο τέλος θα μείνει απ' έξω και η αλήθεια»
-nikos-- Admin
- Αριθμός μηνυμάτων : 2960
Ημερομηνία εγγραφής : 29/05/2013 -
Απ: arduino project
από -nikos- Τετ Αυγ 31, 2016 11:12 am
ΠΩς βαζουμε μια νεα βιβλιοθηκη μεσα στο αρντουινο =πολύ επεξηγηματικο βίντεο για αρχάριους...περιγραφει 3 τροπους.
Έχει επεξεργασθεί από τον/την -nikos- στις Παρ Μαρ 24, 2023 9:47 am, 1 φορά
_________________
«αν κλείσεις την πόρτα σου σε κάθε πλάνη, στο τέλος θα μείνει απ' έξω και η αλήθεια»
-nikos-- Admin
- Αριθμός μηνυμάτων : 2960
Ημερομηνία εγγραφής : 29/05/2013 -
Απ: arduino project
από maiklkf Τετ Σεπ 07, 2016 9:36 pm
Αντε να κάνουμε καμιά κατασκευή σκουριάσαμε χαααααααααααα
_________________
Αν δεν μάθεις σε κάποιον να μιλά Πως θα ακούσεις τι έχει να σου πει

maiklkf- Αριθμός μηνυμάτων : 55
Ημερομηνία εγγραφής : 20/12/2015
Απ: arduino project
από -nikos- Πεμ Σεπ 08, 2016 8:24 am
maiklkf έγραψε:καλησπέρα έκανα παραγγελία για το cnc τον κλώνο Αυτή την πλακέτα που αναφέρετε ο Γιάννης περιμένω να έρθουν τα drine και τα nema stepper motor
Αντε να κάνουμε καμιά κατασκευή σκουριάσαμε χαααααααααααα
ενδιαφέρων !!!
οταν έρθουν ολα τα υλικά ανεβασε φώτο

_________________
«αν κλείσεις την πόρτα σου σε κάθε πλάνη, στο τέλος θα μείνει απ' έξω και η αλήθεια»
-nikos-- Admin
- Αριθμός μηνυμάτων : 2960
Ημερομηνία εγγραφής : 29/05/2013 -
Απ: arduino project
από maiklkf Σαβ Σεπ 10, 2016 6:46 am
_________________
Αν δεν μάθεις σε κάποιον να μιλά Πως θα ακούσεις τι έχει να σου πει
maiklkf- Αριθμός μηνυμάτων : 55
Ημερομηνία εγγραφής : 20/12/2015
Απ: arduino project
από -nikos- Τετ Σεπ 14, 2016 1:51 pm
maiklkf έγραψε:Νίκο μου καλή σου μέρα σε εσένα και στους φίλους που μας διαβάζουν, Ναι και βέβαια θα ενημερώσω με υλικό και κατασκευή.
Μιχαλη καλημερα,, βρήκα
ενα βιντεο με καποιον που εφτιαξε cnc ruter με arduino και φενεται οτι τα καταφερε μια χαρα...
τσεκαρε το,, λογικα εχει και κωδικα και επεξηγησεις στα 6 βιντεο που εχει κανει..
_________________
«αν κλείσεις την πόρτα σου σε κάθε πλάνη, στο τέλος θα μείνει απ' έξω και η αλήθεια»
-nikos-- Admin
- Αριθμός μηνυμάτων : 2960
Ημερομηνία εγγραφής : 29/05/2013 -
Απ: arduino project
από maiklkf Τετ Σεπ 14, 2016 5:40 pm
καλησπέρα Νίκο Τελικά το ίδιο βίντεο είδαμε, χαααααα Ναι είναι το καλύτερο που είδα, στης βάσεις αυτή θα φτιάξω το δικό μου απλά θα το κάνω ποιο μικρό
πάντως ευχαριστώ για την ενημέρωση είναι best of the best αυτή η κατασκευή
εχω γράψει και μήνυμα στα σχόλια σε ενα βιντεο
_________________
Αν δεν μάθεις σε κάποιον να μιλά Πως θα ακούσεις τι έχει να σου πει
maiklkf- Αριθμός μηνυμάτων : 55
Ημερομηνία εγγραφής : 20/12/2015
Απ: arduino project
από -nikos- Τετ Σεπ 21, 2016 2:50 pm
-nikos- έγραψε:ηρθαν τα σενσορακια και αρχισα τα πειραματα...
ευθης αμεσως εφτιαξα και ενα ρανταρ παρκαρισματος με 8 λεντ..
εδω το εχω στην πλακετα δοκιμων μου... οταν το φτιαξω
πανελακι θα ανεβασω και βιντεο..
ετοιμο και το βιντεο =
ο κωδικας που χρησιμοποιω
#define trigPin 2
#define echoPin 3
#define led 13
#define led2 12
#define led3 11
#define led4 10
#define led5 9
#define led6 8
#define led7 7
#define led8 6
int sound = 200;
void setup() {
Serial.begin (9600);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
pinMode(led, OUTPUT);
pinMode(led2, OUTPUT);
pinMode(led3, OUTPUT);
pinMode(led4, OUTPUT);
pinMode(led5, OUTPUT);
pinMode(led6, OUTPUT);
pinMode(led7, OUTPUT);
pinMode(led8, OUTPUT);
}
void loop() {
long duration, distance;
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(2);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH);
distance = (duration/2) / 29.1;
if (distance <50) {
digitalWrite(led, HIGH);
sound = 20;
}
else {
digitalWrite(led,LOW);
}
if (distance <40) {
digitalWrite(led2, HIGH);
sound = 60;
}
else {
digitalWrite(led2, LOW);
}
if (distance < 35) {
digitalWrite(led3, HIGH);
sound = 80;
}
else {
digitalWrite(led3, LOW);
}
if (distance < 30) {
digitalWrite(led4, HIGH);
sound = 100;
}
else {
digitalWrite(led4,LOW);
}
if (distance < 20) {
digitalWrite(led5, HIGH);
sound = 120;
}
else {
digitalWrite(led5,LOW);
}
if (distance < 15) {
digitalWrite(led6, HIGH);
sound = 160;
}
else {
digitalWrite(led6,LOW);
}
if (distance < 10) {
digitalWrite(led7, HIGH);
sound = 180;
}
else {
digitalWrite(led7,LOW);
}
if (distance < 5) {
digitalWrite(led8, HIGH);
sound = 200;
}
else {
digitalWrite(led8,LOW);
}
if (distance > 80 || distance <= 0){
Serial.println("Out of range");
}
else {
Serial.print(distance);
Serial.println("cm");
}
delay(100);
}
_________________
«αν κλείσεις την πόρτα σου σε κάθε πλάνη, στο τέλος θα μείνει απ' έξω και η αλήθεια»
-nikos-- Admin
- Αριθμός μηνυμάτων : 2960
Ημερομηνία εγγραφής : 29/05/2013 -
brushless motor driver -Arduino - Electronic Speed Controller (ESC)
από -nikos- Τετ Οκτ 19, 2016 1:04 pm
κωδικας =
#include < Servo.h >
Servo esc;
void setup ()
{
esc.attach(6);
esc.writeMicroseconds(1000)
;Serial.begin(9600);
}
void loop()
{
int val;
val= analogRead(A4);
val= map(val,0,1023,1000,2000);
esc.writeMicroseconds(val);
}
βιντεο =
δευτερος κωδικας για προχω καταστασεις.
#include
//define our servos
Servo servo1;
Servo servo2;
Servo servo3;
Servo servo4;
Servo servo5;
//define joystick pins (Analog)
int joyX = 0;
int joyY = 1;
int joyb = 3;
int joyd = 4;
int joyVal;
int joyXState = 0;
void setup ()
{
//attaches our servos on pins PWM 3-5
servo1.attach(3);
servo2.attach(5);
servo3.attach(6);
servo4.attach(10);
}
void loop ()
{
//read the value of joystick (betwen 0-1023)
joyVal = analogRead(joyX);
joyVal = map(joyVal, 0, 1023, 0, 180); //servo value betven 0-180
servo1.write(joyVal);//set the servo position acording to the joystick value
joyXState = analogRead(joyX);// ΔΙΑΒΑΖΕΙ ΤΟ joyXState
if(joyXState>=130 && joyXState<=450) //
// ΑΝ ΑΠΛΑ ΘΕΛΟΥΜΕ ΑΠΟ ΚΑΠΟΙΑ ΤΙΜΗ ΚΑΙ ΠΑΝΩ ΘΑ ΒΑΛΟΥΜΕ ΤΟ if(joyXState>=110)
// ΠΧ 110 ΚΑΙ ΑΝΩ
// ΑΝ ΘΕΛΟΥΜΕ ΟΡΙΟ ΑΝΩΤΕΡΗΣ ΚΑΙ ΚΑΤΩΤΕΡΗΣ ΤΙΜΗΣ ΒΑΖΟΥΜΕ if(joyXState>=10 && joyXState<=110)
// ΚΑΤΩΤΕΡΟ ΟΡΙΟ ΤΟ ΠΧ 10 ΚΑΙ ΑΝΩΤΕΡΟ ΤΟ 110
{
delay(12000);
joyVal = analogRead(joyX);
joyVal = map(joyVal, 70, 70, 70, 70);
servo1.write(joyVal);
delay(50);
joyVal = analogRead(joyX);
joyVal = map(joyVal, 80, 80, 80, 80);
servo1.write(joyVal);
delay(50);
joyVal = analogRead(joyX);
joyVal = map(joyVal, 90, 90, 90, 90);
servo1.write(joyVal);
delay(50);
joyVal = analogRead(joyX);
joyVal = map(joyVal, 100, 100, 100, 100);
servo1.write(joyVal);
delay(50);
joyVal = analogRead(joyX);
joyVal = map(joyVal, 110, 110, 110, 110);
servo1.write(joyVal);
delay(40);
joyVal = analogRead(joyX);
joyVal = map(joyVal, 120, 120, 120, 120);
servo1.write(joyVal);
delay(30);
joyVal = analogRead(joyX);
joyVal = map(joyVal, 130, 130, 130, 130);
servo1.write(joyVal);
delay(20);
joyVal = analogRead(joyX);
joyVal = map(joyVal, 140, 140, 140, 140);
servo1.write(joyVal);
delay(10);
joyVal = analogRead(joyX);
joyVal = map(joyVal, 150, 150, 150, 150);
servo1.write(joyVal);
delay(5);
joyVal = analogRead(joyX);
joyVal = map(joyVal, 160, 160, 160, 160);
servo1.write(joyVal);
delay(5);
joyVal = analogRead(joyX);
joyVal = map(joyVal, 170, 170, 170, 170);
servo1.write(joyVal);
delay(5);
joyVal = analogRead(joyX);
joyVal = map(joyVal, 180, 180, 180, 180);
servo1.write(joyVal);
} else {
}
delay(5);
joyVal = analogRead(joyY);
joyVal = map (joyVal, 0, 1023, 10, 180);//
servo2.write(joyVal);
delay(5);
joyVal = analogRead(joyb);
joyVal = map (joyVal, 0, 1023, 10, 180);
servo3.write(joyVal);
delay(5);
joyVal = analogRead(joyd);
joyVal = map (joyVal, 0, 1023, 10, 180);
servo4.write(joyVal);
delay(5);
}
Έχει επεξεργασθεί από τον/την -nikos- στις Πεμ Μαρ 01, 2018 5:41 pm, 5 φορές συνολικά
_________________
«αν κλείσεις την πόρτα σου σε κάθε πλάνη, στο τέλος θα μείνει απ' έξω και η αλήθεια»
-nikos-- Admin
- Αριθμός μηνυμάτων : 2960
Ημερομηνία εγγραφής : 29/05/2013 -
Απ: arduino project
από -nikos- Σαβ Δεκ 03, 2016 5:55 pm
ινβερτερ με μεταβλητή συχνότητα και μεταβλητο PWM για να δοκιμάζετε τους μετασχηματιστες και τα τροφοδοτικά σας θελατε ??
ε,, αν θελατε,,, γεννητρια συχνοτητων απο 10Hz μεχρι και +50KHz και να την φτιαξετε με....arduino
τοτε
μια προσφορα του doityourself 123 by -nikos- για τα μελη του φορουμ.
κωδικας με διπλο pwm με ξεχωριστη ρυθμηση για καθε παλμο και ρυθμιζομενη συχνοτητα

να φτιαχνετε ευκολα τα ινβερτερ σας.
υγ. ........δουλευει αψογα ο κωδικας.
_________________
«αν κλείσεις την πόρτα σου σε κάθε πλάνη, στο τέλος θα μείνει απ' έξω και η αλήθεια»
-nikos-- Admin
- Αριθμός μηνυμάτων : 2960
Ημερομηνία εγγραφής : 29/05/2013 -
Απ: arduino project
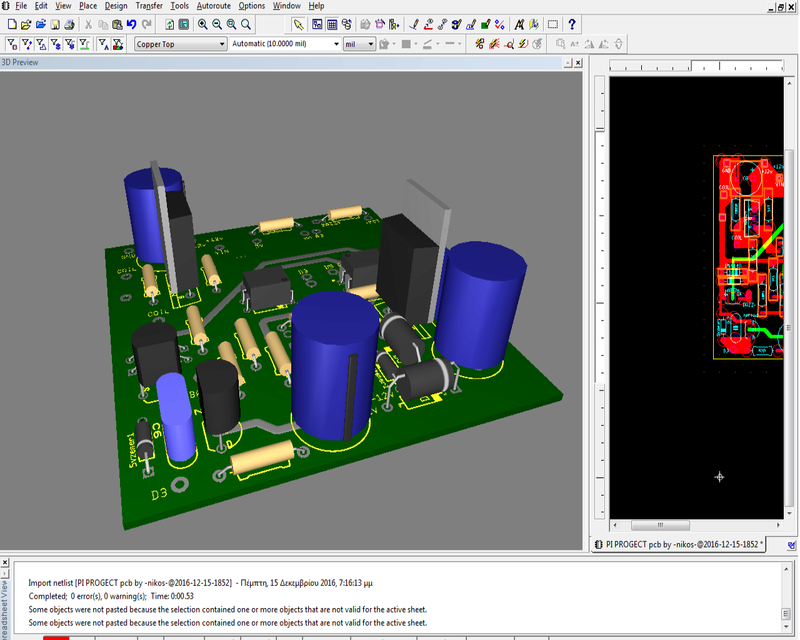
από -nikos- Πεμ Δεκ 15, 2016 8:30 pm
εφαρμογες..!!!
ετσι μπηκα στην διαδικασια για ετοιμες πλακετες,,
στις 3 φωτο εχω μια ματια απο
σχεδιασμο κυκλώματος και μεταφορα σε αρχειο gerber για παραγγελια των τυπομενων pcb...


_________________
«αν κλείσεις την πόρτα σου σε κάθε πλάνη, στο τέλος θα μείνει απ' έξω και η αλήθεια»
-nikos-- Admin
- Αριθμός μηνυμάτων : 2960
Ημερομηνία εγγραφής : 29/05/2013 -
Απ: arduino project
από -nikos- Σαβ Οκτ 21, 2017 8:51 am
γίνεται και αναλογικό-γινεται και με αρντουινο...
το βιντεο ειναι απο καποιον αλλο που το εφτιαξε,,, εγω εφτιαχνα εναν κωδικο για μεταβλητο φλασερ για
στροβοσκοπιο και
ο κωδικας για τον ιπποτη της ασφαλτου ειναι απλα μια επεκταση του ιδιου κωδικα.
ο κωδικας=
/* a program to sequentially turn on and turn off LEDs with variable speed */
int LED1 = 4;
int LED2 = 5;
int LED3 = 6;
int LED4 = 7;
int LED5 = 8;
int LED6 = 9;
int LED7 = 10;
int LED8 = 11;
int sensorPin = A0;
int sensorValue = 0;
void setup() {
pinMode(LED1, OUTPUT);
pinMode(LED2, OUTPUT);
pinMode(LED3, OUTPUT);
pinMode(LED4, OUTPUT);
pinMode(LED5, OUTPUT);
pinMode(LED6, OUTPUT);
pinMode(LED7, OUTPUT);
pinMode(LED8, OUTPUT);
}
void loop() {
digitalWrite(LED2, HIGH); // turn on LED2
digitalWrite(LED1, LOW); //turn off LED1
sensorValue = analogRead(sensorPin);
delay(sensorValue); // wait for time=sensorvalue
digitalWrite(LED3, HIGH); //turn on LED3
digitalWrite(LED2, LOW); //turn off LED2
sensorValue = analogRead(sensorPin);
delay(sensorValue); // wait for time=sensorvalue
digitalWrite(LED4, HIGH); //turn on LED4
digitalWrite(LED3, LOW); //turn off LED3
sensorValue = analogRead(sensorPin);
delay(sensorValue); // wait for time=sensorvalue
digitalWrite(LED5, HIGH); //turn on LED5
digitalWrite(LED4, LOW); //turn off LED4
sensorValue = analogRead(sensorPin);
delay(sensorValue); // wait for time=sensorvalue
digitalWrite(LED6, HIGH); //turn on LED6
digitalWrite(LED5, LOW); //turn off LED5
sensorValue = analogRead(sensorPin);
delay(sensorValue); // wait for time=sensorvalue
digitalWrite(LED7, HIGH); //turn on LED7
digitalWrite(LED6, LOW); //turn off LED6
sensorValue = analogRead(sensorPin);
delay(sensorValue); // wait for time=sensorvalue
digitalWrite(LED8, HIGH); //turn on LED8
digitalWrite(LED7, LOW); //turn off LED7
sensorValue = analogRead(sensorPin);
delay(sensorValue); // wait for time=sensorvalue
digitalWrite(LED7, HIGH); //turn on LED9
digitalWrite(LED8, LOW); //turn off LED8
sensorValue = analogRead(sensorPin);
delay(sensorValue); // wait for time=sensorvalue
digitalWrite(LED6, HIGH);
digitalWrite(LED7, LOW);
sensorValue = analogRead(sensorPin);
delay(sensorValue);
digitalWrite(LED5, HIGH);
digitalWrite(LED6, LOW);
sensorValue = analogRead(sensorPin);
delay(sensorValue);
digitalWrite(LED4, HIGH);
digitalWrite(LED5, LOW);
sensorValue = analogRead(sensorPin);
delay(sensorValue);
digitalWrite(LED3, HIGH);
digitalWrite(LED4, LOW);
sensorValue = analogRead(sensorPin);
delay(sensorValue);
digitalWrite(LED2, HIGH);
digitalWrite(LED3, LOW);
sensorValue = analogRead(sensorPin);
delay(sensorValue);
digitalWrite(LED1, HIGH);
digitalWrite(LED2, LOW);
sensorValue = analogRead(sensorPin);
delay(sensorValue);
}
_________________
«αν κλείσεις την πόρτα σου σε κάθε πλάνη, στο τέλος θα μείνει απ' έξω και η αλήθεια»
-nikos-- Admin
- Αριθμός μηνυμάτων : 2960
Ημερομηνία εγγραφής : 29/05/2013 -
Απ: arduino project
από -nikos- Σαβ Δεκ 09, 2017 10:13 am
αυτη ειναι μια πολυ καλη πατεντα=
πατεντα με την οποια παραμενει ενα σκαφος στην θεση του παρα τα κυματα-ρευματα ή τον ανεμο..
αυτο που χρειαζομαστε ειναι ενα gps να μεταφερει τα δεδομενα του σε αναλογικο σημα ωστε
μεσω της οδηγησης ενός σερβο να μπορει να κρατησει ενα σκαφος την θεση του ή ακομη και να ακολουθησει μια πορεια προδιεγραμμενη !!! βαρκα-drone σαν να λεμε...
πολυ ενιαφερον !!!!!
ενα παραδειγμα=
#include
//define our servos
Servo servo1;
Servo servo2;
Servo servo3;
Servo servo4;
Servo servo5;
//define joystick pins (Analog)
int joyX = 0;
int joyY = 1;
int joyb = 3;
int joyd = 4;
//variable to read the values from the analog pins
int joyVal;
void setup ()
{
//attaches our servos on pins PWM 3-5
servo1.attach(3);
servo2.attach(5);
servo3.attach(6);
servo4.attach(10);
}
void loop ()
{
//read the value of joystick (betwen 0-1023)
joyVal = analogRead(joyX);
joyVal = map(joyVal, 0, 1023, 0, 180); //servo value betven 0-180
servo1.write(joyVal);//set the servo position acording to the joystick value
joyVal = analogRead(joyY);
joyVal = map (joyVal, 0, 1023, 0, 180);
servo2.write(joyVal);
delay(15);
joyVal = analogRead(joyb);
joyVal = map (joyVal, 0, 1023, 0, 180);
servo3.write(joyVal);
delay(15);
joyVal = analogRead(joyd);
joyVal = map (joyVal, 0, 1023, 0, 180);
servo4.write(joyVal);
delay(15);
}
Έχει επεξεργασθεί από τον/την -nikos- στις Σαβ Φεβ 10, 2018 9:03 pm, 1 φορά
_________________
«αν κλείσεις την πόρτα σου σε κάθε πλάνη, στο τέλος θα μείνει απ' έξω και η αλήθεια»
-nikos-- Admin
- Αριθμός μηνυμάτων : 2960
Ημερομηνία εγγραφής : 29/05/2013 -
Απ: arduino project
από -nikos- Σαβ Δεκ 09, 2017 7:39 pm
http://minddump.us/2016/05/autopilot-rc-boat/
εχει κωδικα και περιγραφη.
_________________
«αν κλείσεις την πόρτα σου σε κάθε πλάνη, στο τέλος θα μείνει απ' έξω και η αλήθεια»
-nikos-- Admin
- Αριθμός μηνυμάτων : 2960
Ημερομηνία εγγραφής : 29/05/2013 -
Απ: arduino project
από -nikos- Δευ Δεκ 11, 2017 11:12 am
http://www.instructables.com/id/Boat-Autopilot/
οπως φενεται χρειαζεται η βιβλιοθήκη αυτη στο arduino= http://arduiniana.org/libraries/tinygpsplus/
ισως το βρω και ετοιμο κατασκευασμενο,,
σκευτομαι οτι ενα φθηνο drone με gps θα εχει το λειτουργικο ετοιμο !!

και μονο η μεταφορα των εντολων απο τα σερβο του drone στα σερβο της ηλεκτρικης εξολεμβιας
να ειναι η απαιτηση.
ενα τετειο=https://www.ebay.co.uk/itm/APM-2-8-Flight-Controller-6M-GPS-With-Compass-Autopilot-Module-RC-Airplane-Part/361631812778?epid=1746280862&hash=item5432ef8caa:g:pzUAAOSwbYZXe3v9
55 ευρο εχει.
η σελιδα τους = http://ardupilot.org/
_________________
«αν κλείσεις την πόρτα σου σε κάθε πλάνη, στο τέλος θα μείνει απ' έξω και η αλήθεια»
-nikos-- Admin
- Αριθμός μηνυμάτων : 2960
Ημερομηνία εγγραφής : 29/05/2013 -
Απ: arduino project
από -nikos- Τετ Ιαν 03, 2018 12:55 pm
-nikos- έγραψε:μετά τον τελευταίο κωδικά που έφτιαξα
χθες αποφάσισα ότι ήταν ώρα για να γυρίσω ένα βίντεο με
όσα περιγράφω στα προηγούμενα ποστ,, για να βοηθηθούν όσο γίνεται περισσότεροι φίλοι....
Το βιντεο=
Αρντουινο-σπαστε τον κωδικα
enjoy
Αρντουινο σπαστε τον κωδικα λοιπον...
απο τοτε που εκανα αυτο το βιντεο κυλισε πολυ ''νερο στο αυλακι'' και
οι προσομειωσεις για το αρντουινο οσο πανε και γινονται καλυτερες....
ετσι η τελευταια εξελιξη στο ''σπασιμο του κωδικα''
ή ''πως να φτιαξετε κωδικα χωρις να γνωριζετε την γλωσσα προγραματισμου''
ακουει στο ονομα οχι ενος αλλα τουλαχιστον 3 προγραμματων που κανουν
το εξης= εσυ ''ζωγραφιζεις'' αυτο που θες και το προγραμμα το μετατρεπει σε κωδικα του αρντουινο !!!
τρελο ετσι ??
το πρωτο προγραμμα λεγεται XOD και θα το βρειτε εδω=
https://xod.io/?utm_source=announce&utm_medium=youtube&utm_campaign=tutorial_xod
συμφωνα με πολλους ειναι το πιο ευκολο στην χρηση, και το πιο σημαντικο ειναι ΔΩΡΕΑΝ

μετα ειναι το VISUINO και θα το βρειτε εδω=
https://www.visuino.com/
Μετα ειναι το Visual Micro
που θα το βρειτε εδω= http://www.visualmicro.com/
και το FlowStone που θα το βρειτε εδω=
http://www.dsprobotics.com/flowstone.html
το flow stone οπως φενεται ειναι το πιο εξελιγμενο αλλα ισως και το XOD να σας καλυπτει αψογα...
ετσι, ''σπαστε τον κωδικα'' και φτιαξτε ευκολα τις κατασκευες σας...
_________________
«αν κλείσεις την πόρτα σου σε κάθε πλάνη, στο τέλος θα μείνει απ' έξω και η αλήθεια»
-nikos-- Admin
- Αριθμός μηνυμάτων : 2960
Ημερομηνία εγγραφής : 29/05/2013 -
Απ: arduino project
από -nikos- Πεμ Φεβ 15, 2018 6:05 pm
βιντεο=
_________________
«αν κλείσεις την πόρτα σου σε κάθε πλάνη, στο τέλος θα μείνει απ' έξω και η αλήθεια»
-nikos-- Admin
- Αριθμός μηνυμάτων : 2960
Ημερομηνία εγγραφής : 29/05/2013 -
Απ: arduino project
από -nikos- Σαβ Μαρ 24, 2018 2:16 pm
 ...ναι.. και τετρακοπτερο βεβαίως-βεβαίως...
...ναι.. και τετρακοπτερο βεβαίως-βεβαίως...βιντεο με την αποδειξη..=
τις μερες αυτες πειραματιστηκα με το γυροσκοπιο MPU6050 και ειναι αρκετα πολυπλοκο να το φτιαξει καποιος...
ενα ωραιο βιντεο για το τι πρεπει να επιτευχθει θα δειτε εδω=
ο στόχος ειναι να ελεγχθούν 3 άξονες =περιστροφή-ισορροπία εμπρος-πισω και δεξιά-αριστερά...
πειραματιστηκα με διαφορους κωδικες και μεχρι στιγμης πετυχα την ισορροπια επιφανιας δυο αξωνων.... την περιστροφη [τριτος αξωνας] το προσπαθω ακομη...
ο απλος τροπος να ''χακαρουμε'' τους τρεις αξωνες ειναι να παρουμε ενα φτηνιάρικο drone και να παρουμε το γυροσκοπικο του.
ο αμεσος επομενος ειναι να χρεισιμοποιησουμε δυο arduino nano και δυο MPU6050 χρεισημοποιωντας τον κωδικα που εχω ηδη,, για τον 3 αξωνα,
και ο ποιο δυσκολος ειναι τελικα να βρουμε-φτιαξουμε κωδικα με 3 αξωνες σε ενα αρντουινο....
Ακουστε... τα δυσκολα ειναι για τους καλους αλλα.....τα ευκολα ειναι για τους καλυτερους
 .
.ετσι οσο ψαχνω τους κωδικες παρηγγηλα και ενα τετειο= https://www.ebay.co.uk/itm/JJRC-H48-Mini-Drone-RC-Quadcopter-Infrared-Control-2-4G-4CH-6-Axis-3D-Flips-Toys/322962047206?_trkparms=aid%3D222007%26algo%3DSIM.MBE%26ao%3D2%26asc%3D49919%26meid%3D835aa694210d4a0598853dc21f689a2a%26pid%3D100005%26rk%3D6%26rkt%3D6%26sd%3D132416036895%26itm%3D322962047206&_trksid=p2047675.c100005.m1851
με 11 ευρο.... εχει λεει...6 axis γυροσκοπιο...πιστευω οτι θα το χακαρω ευκολα...
_________________
«αν κλείσεις την πόρτα σου σε κάθε πλάνη, στο τέλος θα μείνει απ' έξω και η αλήθεια»
-nikos-- Admin
- Αριθμός μηνυμάτων : 2960
Ημερομηνία εγγραφής : 29/05/2013 -
Σελίδα 2 από 3 • 1, 2, 3